A posição do pistão no interior do cilindro: Onde: PMS: Ponto Morto Superior – é a posição na qual o pistão está o mais próximo possível do cabeçote. PMI: Ponto
THOMAS R. KANE\(^1\) Department of Applied Mechanics, Stanford University, Stanford, California, U.S.A. Received 16 September 1974 \( \textbf{Resumo.}\) As considerações cinemáticas desempenham um papel importante na análise dinâmica de veículos
Continue lendo…Relações Cinemáticas Fundamentais Para Veículos de Via Simples
R. S. Sharp Lecturer, Department of Mechanical Engineering, University of Leeds, Leeds, LS2 9JT. (The M.S. of this paper was received at the Institution on 10th August 1970 and accepted
Não há resumo por ser um post protegido.
Para dimensionar um coroa (Sprocket) precisamos conhecer os seguintes dados (Usando uma coroa traseira da Teneré 250 como exemplo): Dados extraídos da coroa teneré 250: Passo:$P = 15.875 mm$ Número
Considere um fluido incompressível, de massa específica \(\rho\), que escoa em regime permanente com velocidade uniforme \(v\) em um trecho de duto consistindo de uma curva a 90º, no plano
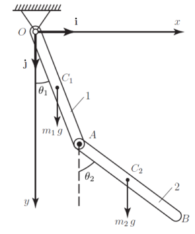
Equações de Movimento e de Lagrange em um pêndulo duplo.
…
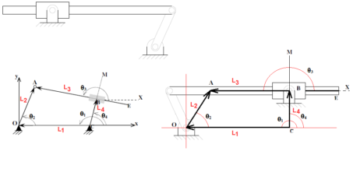
Formulação de um Mecanismo de 4 barras. …
Vou tentar depois….
Boas-vindas ao WordPress. Esse é o seu primeiro post. Edite-o ou exclua-o, e então comece a escrever!