Pêndulo Duplo
Equações de Movimento e de Lagrange
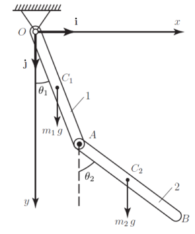
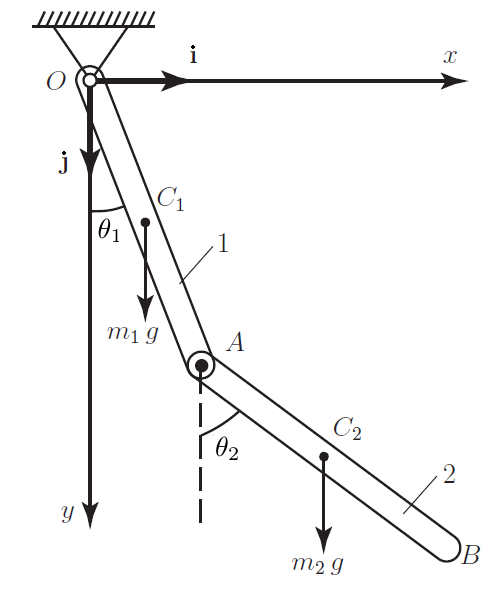
Para o pêndulo duplo mostrado na figura, as barras de ligações 1 e 2 (barras  e
e  ) são homogêneas e têm os comprimentos
) são homogêneas e têm os comprimentos  ,
,  e as massas
e as massas  , o
, o  . Em
. Em  e
e  há pinos nas juntas. Os centros de massa das ligações 1 e 2 são
há pinos nas juntas. Os centros de massa das ligações 1 e 2 são  e
e  . Localize e resolva as Equações de Lagrange e de movimento se o duplo pêndulo é liberado a partir do repouso quando os ângulos dos elos 1 e 2 em relação a vertical são
. Localize e resolva as Equações de Lagrange e de movimento se o duplo pêndulo é liberado a partir do repouso quando os ângulos dos elos 1 e 2 em relação a vertical são  e
e  .
.
Solução:
Para caracterizar a configuração do sistema, são empregados duas coordenadas generalizadas  e
e  . A coordenada
. A coordenada  é a medida do ângulo em radianos do entre o eixo vertical e o elo 1 e
é a medida do ângulo em radianos do entre o eixo vertical e o elo 1 e  é a medida do ângulo de rotação em radianos entre o elo 2 e a direção vertical. O vetor de posição de vetor de velocidade do centro de massa de do elo 1 pode ser escrito como
é a medida do ângulo de rotação em radianos entre o elo 2 e a direção vertical. O vetor de posição de vetor de velocidade do centro de massa de do elo 1 pode ser escrito como
(1) 
(2) 
O vetor de posição de vetor de velocidade do centro de massa de do elo 2 pode ser escrito como
(3) ![\begin{equation*} {\bf r}_{C_2}=\left[L sen(\theta_1) + \frac{1}{2}L sen (\theta_2)\right]{\bf i} + \left[L cos(\theta_1) + \frac{1}{2}L cos (\theta_2)\right] {\bf j} \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-57be9e5c6bd39f523043d33788e059f8_l3.png "Rendered by QuickLaTeX.com")
(4) ![\begin{equation*} {\bf v}_{C_2}=\frac{d{\bf r}_{C_2}}{dt} = \left[L \dot{\theta_1} cos(\theta_1) + \frac{1}{2}L \dot{\theta_2} cos (\theta_2)\right]{\bf i} - \left[L \dot{\theta_1}sen(\theta_1) + \frac{1}{2}L \dot{\theta_2} sen (\theta_2)\right] {\bf j} \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-79e66f5172a42bb60a1265ad7ab95181_l3.png "Rendered by QuickLaTeX.com")
As energias cinéticas da ligações 1 e 2 são
(5) 
(6) 
(7) ![\begin{equation*} K_2 = \frac{1}{2} \frac{mL^2}{12}\dot{\theta_2}^2 + \frac{1}{2}m \left[L^2\dot{\theta_1}^2 + \frac{1}{4}L^2\dot{\theta_2}^2 + L^2\dot{\theta_1} \dot{\theta_2} cos(\theta_2 - \theta_1)\right] \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-02dab84730ccd4cddd257bc0608423e2_l3.png "Rendered by QuickLaTeX.com")
onde  é o momento de inércia em torno do centro de rotação de O, e
é o momento de inércia em torno do centro de rotação de O, e  é o momento de inércia em torno do centro de massa
é o momento de inércia em torno do centro de massa 
A energia cinética total do sistema é
(8) ![\begin{equation*} K = K_1 + K_2 = \frac{mL^2}{6}[4 \dot{\theta_1}^2 + 3 \dot{\theta_1}\dot{\theta_2} cos(\theta_2 - \theta_1) + \dot{\theta_2}^2] \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-e74a465c9cb76c5d3166b564213b935b_l3.png "Rendered by QuickLaTeX.com")
O lado esquerdo da equação de Lagrange é
(9) ![\begin{equation*} \frac{\partial K}{\partial \dot{\theta_1}} = \frac{mL^2}{6}[8 \dot{\theta_1} + 3 \dot{\theta_2} cos(\theta_2 - \theta_1)] \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-b62001fede5b67a49dde02f5356d05a6_l3.png "Rendered by QuickLaTeX.com")
(10) ![\begin{equation*} \frac{d}{dt}\left(\frac{\partial K}{\partial \dot{\theta_1}}\right) = \frac{mL^2}{6}[8 \ddot{\theta_1} + 3 \ddot{\theta_2} cos(\theta_2 - \theta_1) - 3 \dot{\theta_2}(\dot{\theta_2} - \dot{\theta_1}) sen(\theta_2 - \theta_1) ] \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-26c8e3f89c1e1a4283908db4a1049f79_l3.png "Rendered by QuickLaTeX.com")
(11) 
(12) ![\begin{equation*} \frac{\partial K}{\partial \dot{\theta_2}} = \frac{mL^2}{6}[3 \dot{\theta_1} cos(\theta_2 - \theta_1) + 2 \dot{\theta_1}] \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-992f54c12114590e523e5add53a77a6c_l3.png "Rendered by QuickLaTeX.com")
(13) ![\begin{equation*} \frac{d}{dt}\left(\frac{\partial K}{\partial \dot{\theta_2}}\right) = \frac{mL^2}{6}[3 \ddot{\theta_1}cos(\theta_2 - \theta_1) - 3 \dot{\theta_1} (\dot{\theta_2} - \dot{\theta_1}) sen(\theta_2 - \theta_1) +2 \ddot{\theta_2}] \end{equation*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-23ff954a47b62140451081e98a2e09f2_l3.png "Rendered by QuickLaTeX.com")
(14) 
As forças gravitacionais sobre as ligações 1 e 2 no centros de massa e são
(15) 
Existem duas forças generalizadas associadas a e  são
são
(16) ![\begin{eqnarray*} F_1 &=& {\bf G}_1 \cdot \frac{\partial{\bf r}_{C_1}}{\partial \theta_1} + {\bf G}_2 \cdot \frac{\partial{\bf r}_{C_2}}{\partial \theta_1}\\ &=& mg {\bf j} \cdot \left[\frac{1}{2}L cos(\theta_1) {\bf i} - \frac{1}{2}L sen (\theta_1) {\bf i} \right]+ \;\;\;\;\;\;\;\;\ \\ &+& mg {\bf j} \cdot [L cos(\theta_1) {\bf i} - L sen (\theta_1) {\bf i}]\\ &=& -\frac{3}{2}mg L sen(\theta_1) \end{eqnarray*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-8ff390becd79a1aa45c14b57ad1c8009_l3.png "Rendered by QuickLaTeX.com")
(17) ![\begin{eqnarray*} F_2 &=& {\bf G}_1 \cdot \frac{\partial{\bf r}_{C_1}}{\partial \theta_2} + {\bf G}_2 \cdot \frac{\partial{\bf r}_{C_2}}{\partial \theta_2}\\ &=& mg {\bf j}\cdot 0 + mg {\bf j} \cdot \left[\frac{1}{2}L cos(\theta_2) {\bf i} - \frac{1}{2}L sen (\theta_2) {\bf i} \right]\\ &=& -\frac{1}{2}mg L sen(\theta_2) \end{eqnarray*}](https://alvesintech.com/wp-content/ql-cache/quicklatex.com-d5b28eebb89570ff00fb3d832124d0a9_l3.png "Rendered by QuickLaTeX.com")
As equações de Lagrange são escritas como
(18) 
(19) 
e as equações de movimento pode ser escrita como
(20) 